Class Meeting 09: Markov Decision Processes (MDPs)
Today's Class Meeting
- Learning about Markov decision processes (here's a link to the slides)
- Completing hands-on exercises computing & determining Markov decision process policies and values; on this page you can find solutions to the class exercises
What You'll Need for Today's Class
- Some scratch paper to work through some of today's class exercises
Markov Decision Process (MDP)
A Markov decision process (MDP) is defined by the tuple \( \langle S, A, T, R, \gamma \rangle \), where:
- \(S\) is the set of possible states with \(s \in S\)
- \(A\) is the set of possible actions that can be taken \(a \in A\), in our case, these are usually the actions that the robot can take
- \(T: S \times A \times S \rightarrow [0,1]\) is a probabilistic transition function where \(T(s_t, a_t, s_{t+1}) \equiv \textrm{Pr}(s_{t+1} | s_t, a_t)\), representing the probability that we end up in state \(s_{t+1}\) given that we started in state \(s_t\) and took action \(a_t\)
- \(R: S \times A \times S \rightarrow \mathbb{R}\), the reward function where a \((s_t, a_t, s_{t+1})\) tuple is assigned a real-number (\(\mathbb{R}\)) reward value
-
\(\gamma\) is the discount factor where \((0 \le \gamma \lt 1) \), which indicates how much future rewards are considered in the actions of a system
- \(\gamma = 0\) would indicate a scenario in which a robot only cares about the rewards it could get in a single moment, as where
- \(\gamma = 1\) indicates a scenario where the robot doesn't care at all about the short term and pursues whatever actions will produce the best long-term reward (regardless of how long that takes)
- \(\pi(s_t) \rightarrow a_t\), a policy that determines an optimal action to take for every state in the state space
- \(V(s_t)\), the value of being in a state given by the Bellman equation where \(V(s_t) = \textrm{max}_{a_t} \Bigg( R(s_t,a_t) + \gamma \sum_{s_{t+1} \in S} T(s_t, a_t, s_{t+1}) \: V(s_{t+1}) \Bigg)\)
For today's class the environment we're exploring is a grid world, pictured below.
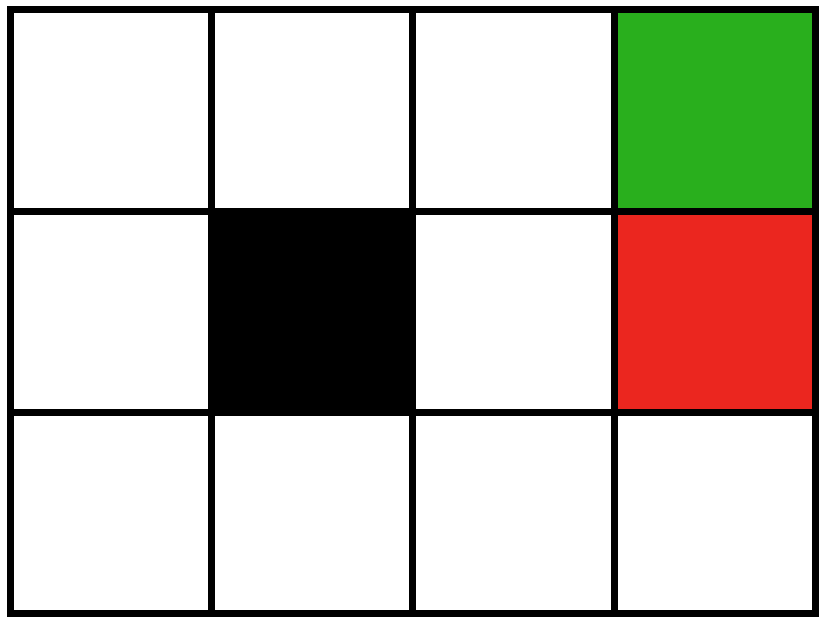
With this grid world, we define the following Markov decision process \( \langle S, A, T, R, \gamma \rangle \):
- \(S\): our states are represented as grid cells, each grid cell is one state in our world
- \(A\): the actions the robot can take in the world include moving up, down, left, and right; so there are 4 total actions that can be taken in this world
-
\(T\): the robot moves as expected with action \(a_t\) from one state (\(s_t\)) to another (\(s_{t+1}\)) with probability 0.8. With probability 0.1, the robot moves as intended except to the right. And with probability 0.1, the robot moves as intended except to the left. Here are some examples:
- If \(a_t\) specifies that the robot should move to the right, with probability 0.8 the robot will move right. With probability 0.1 the robot will move up. And with probability 0.1 the robot will move down.
- If \(a_t\) specifies that the robot should move down, with probability 0.8 the robot will move down. With probability 0.1 the robot will move right. And with probability 0.1 the robot will move left.
- \(R\): for today's class we only depend on the state of the world to determine the reward, the reward for being in the green square is \(+1\) and the reward for being in the red square is \(-1\), the reward for being in the remaining states depends on the exercise
- \(\gamma\): for today's class we'll use a gamma value of 0.8
Class Exercise #1: Determining MDP Policies with Different Reward Functions
For this exercise, you will determine the optimal policy for the grid world with two different reward functions. For each reward function, you will determine a unique optimal policy.
Reward function #1:
- \(R(\textrm{green}) = +1\)
- \(R(\textrm{red}) = -1\)
- \(R(\textrm{everywhere else}) = +2\)
Reward function #2:
- \(R(\textrm{green}) = +1\)
- \(R(\textrm{red}) = -1\)
- \(R(\textrm{everywhere else}) = -2\)
Class Exercise #2: Value Iteration Computation
Breakout Rooms
For this class exercise, you'll be working in groups of 3-ish. Like in previous class meetings, you'll get to choose your own breakout room:
- Breakout Room A: Those who choose a breakout room of type A are looking for a fully collaborative breakout room experience where all members of the room are working together on a shared screen, where all members are working on and contributing towards one common solution.
- Breakout Room B: Those who choose a breakout room of type B are looking for a verbally communicative breakout room experience where each member works independently on their own solution and members are in relatively constant communication, asking one another questions, following along with one another, etc.
- Breakout Room C: Those who choose a breakout room of type C are looking for a quieter breakout room experience were each member works independently on their own solution and remain quiet for the most part, asking questions when they come up, but preferring a quiet environment.
Value Iteration
With our grid world and the specified reward function (which is the same as reward function #2 from exercise #1), compute the value for each state in the grid world using the Bellman equation: \(V(s_t) = \textrm{max}_{a_t} \Big( R(s_t,a_t) + \gamma \sum_{s_{t+1} \in S} T(s_t, a_t, s_{t+1}) \: V(s_{t+1}) \Big)\) and the value iteration approach. Before we start with value iteration, you can assume that the value for each state is 0.
Reward function:
- \(R(\textrm{green}) = +1\)
- \(R(\textrm{red}) = -1\)
- \(R(\textrm{everywhere else}) = -2\)
To keep everyone on the same page, we're all going to follow the same set of trajectories:
| Trajectory 1 | Trajectory 2 | Trajectory 3 | Trajectory 4 | Trajectory 5 | Trajectory 6 | |
| \(s_0\) | [0,0] | [0,0] | [0,0] | [0,0] | [0,0] | [0,0] |
| \(a_0\) | UP | UP | RIGHT | RIGHT | UP | RIGHT |
| \(s_1\) | [1,0] | [1,0] | [0,1] | [0,1] | [1,0] | [0,1] |
| \(a_1\) | UP | UP | RIGHT | RIGHT | UP | RIGHT |
| \(s_2\) | [2,0] | [2,0] | [0,2] | [0,2] | [2,0] | [0,2] |
| \(a_2\) | RIGHT | RIGHT | UP | RIGHT | RIGHT | UP |
| \(s_2\) | [2,1] | [2,1] | [1,2] | [0,3] | [2,1] | [1,2] |
| \(a_3\) | RIGHT | RIGHT | RIGHT | UP | RIGHT | UP |
| \(s_2\) | [2,2] | [2,2] | [1,3] | [1,3] | [2,2] | [2,2] |
| \(a_3\) | RIGHT | RIGHT | RIGHT | RIGHT | ||
| \(s_2\) | [2,3] | [2,3] | [2,3] | [2,3] |
To get a better sense of how to attack this problem, we'll help you out by computing the values for the first trajectory and the first two steps of the second trajectory:
- Trajectory 1
-
\(V([2,3]) = +1\)
- We can determine this value because \(R(s_t,a_t) = +1\) for being in the green state and once we get into the green state, the world ends (we cannot transition into any further states), meaning that for all \(a_t\), \(\Big(\gamma \sum_{s_{t+1} \in S} T(s_t, a_t, s_{t+1}) \: V(s_{t+1}) \Big) = 0\).
-
\(V(\textrm{all-other-states}) = -2\)
- We can determine this value because \(R(s_t,a_t) = -2\) and all states initially starts out with a value of 0, \(V(s_{t+1}) = 0\), for all states until after we go through the first iteration.
- Trajectory 2
-
\(V([0,0]) = -2 + \gamma (0.8 \cdot 0 + 0.1 \cdot -2 + 0.1 \cdot -2) = - 2 + \gamma (-0.4) = -2 + 0.8 \cdot -0.4 = -2.32\)
- The optimal action in this case would be a move to the RIGHT, since the value of state [0,1] is currently 0 and the value of state [1,0] is currently -2.
-
\(V([1,0]) = -2 + \gamma (0.8 \cdot -2 + 0.1 \cdot -2 + 0.1 \cdot -2) = -2 + \gamma (-2) = -2 + 0.8 \cdot -2 = -3.6 \)
- The optimal action in this case would be a move UP since the value of state [2,0] is currently -2 and the value of state [0,0] is currently now -2.32.
Acknowledgments
The lecture for today's class was informed by Kaelbling et al. (1996) and Charles Isbell and Michael Littman's Udacity course on Reinforcement Learning.